Using OpenCV, few hsv launchpad values were taken to be processed and identified by the algorithm.
Before starting, it is important to resize the images to get some comfortable sizes to work with. The original images are 4000×2250 and it is going to be difficult to work with them unless the size is reduced.
For the first attempt, one of the Launchpad set images where the launchpad is clearly visible will be used.
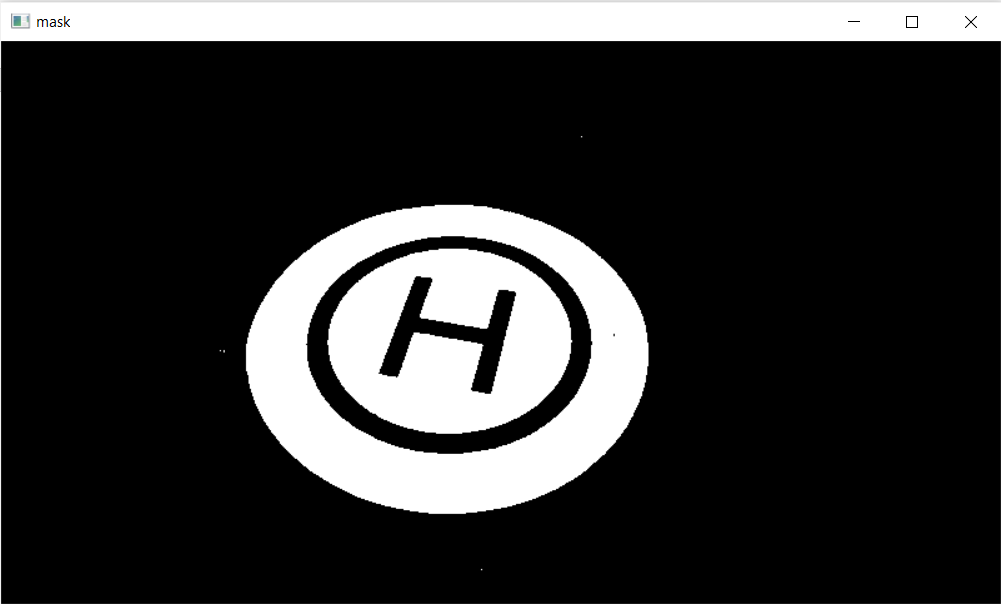
Once this image is taken, being helped by an HSV map, the different orange colour tonalities were introduced into the code to create a mask and detect the launchpad.
Trying different HSV value ranges and applying different threshold operations to the mask, a good result was obtained:
Despite of obtaining such a good result, this will be only valid for this single image, and that is not what we intend to do for the functionality; Our goal is to be able to identify the launchpad during different light conditions, distances and environments.
So far, we can detect very precisely one image under certain conditions. Our next step will be adjusting the detection algorithm to be able to improve the number of successful detections over a wide range of conditions.
To do so, different images with different light conditions and distances will be included.
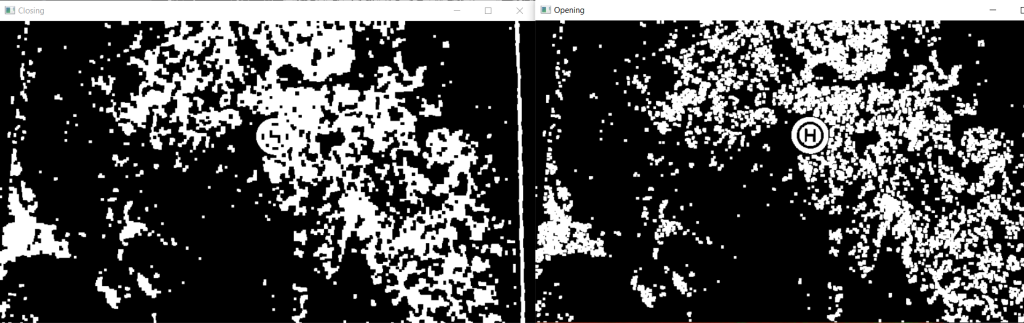
While working with different images, the ones where the launchpad was at a higher distance from the camera were the most difficult to detect with the original algorithm used.
As it can be observed, the morphological transformations applied to the masks could give some hints about how the problem could be solved.
After trying widely all of the different HSV orange colour possibilities and not getting good results for the different sizes and light conditions of the different images, some changes were applied to the morphological transformations.
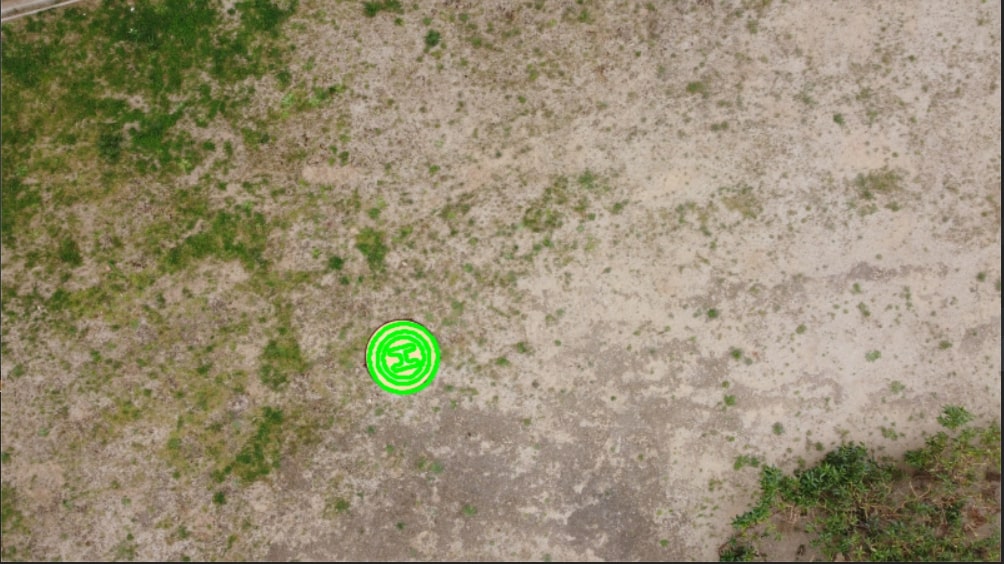
The final change that made the difference was creating two different kernels for the opening and closing transformations, one of bigger size for the opening transformation and one of lower size for the closing transformation.
This change
improves the performance of the detection algorithm when the drone is at higher
altitudes and consequently the launchpad size is smaller on the images, being
able to detect better the shape of the “H” on the launchpad and removing almost
all the noise for all the image set.
This is the
final result obtained for some of the different images from the set:
As mentioned in Activity 11, another option for controlling unmanned aircraft is dynamic flight planning. In general, in the drone platform, we use a Raspberry py as an onboard computer. The programs for our onboard Read more…
In this section we will show how to recreate a terrain with a set of images using photogrammetry. The software that is going to be used for the process is Global Mapper. Although is not Read more…








0 Comments