One of the problems that current Drones have is that there are very few that have integrated navigation without GPS. A drone needs a minimum of 1 GPS to be able to execute a mission, but when we are indoors or in remote places where there is no coverage, a navigation system without GPS is necessary.
In this project we will integrate the Intel RealSense D435 camera in order to use it as a navigation system without using GPS. For this, it is also necessary to integrate a Raspberry Pi, as an on-board computer to transmit the data from the camera to the controller.
Next, we will explain step by step how we have done this integration:
Step 1: Analysis of the location of the camera on the Drone
In previous phases, we have shown our platform. To remind how was our Drone, here you have some figures with the platform mounted and ready to do the firsts test flights:


As it can be seen, there are four levels on the platform where components can be attached. The battery is attached to the bottom one, the wiring and the power distribution plate are attached to the next one, the controller, buzzer, radios, etc. are attached to the next one above, and finally the GPS is attached to the top one.
In order to be able to mount our camera and Raspberry Pi, we first need the camera to be as high as possible so that it doesn’t have any objects obstructing its view, so mounting it at the highest level is ideal. For what the on-board computer does, as it needs cooling if you want to process scripts and data, mounting it at the highest level makes it easier for the air from the propellers to do the air cooling of the computer, so the choice is also in the upper level, next to the camera and the GPS.
Step 2: Study of the state of the art on the use of the Intel RealSense D435 camera for navigation in Drone applications
Now, we will see different links with valuable information about this cameras in order to understand what we can do with them:
- Low cost indoor navigation system for drones
- Intel RealSense T265 – Ardupilot
- V-SLAM Alrgorithem
- Intel Realsense T265 tracking camera for mobile robotics – first impressions
- Kalman Filter
- Intel RealSense Cameras
- Evaluation of the Intel RealSense T265 for tracking natural human head motion
Step 3: Establish communications with the Intel RealSense T265/D435 camera
To communicate with the RealSense cameras, Intel has created a software development kit (SDK) so that developers can create a software project working with these cameras. The SDK (Software Development Kit) is called the Intel RealSense SDK 2.0, and is a multi-platform library that supports both the D400 and SR300 family of depth cameras and the T265 tracking camera.
The Python library is called librealsense2 and can be installed through the IDE we use or through the installer provided by the SDK. The great advantage of the library is that it is open source and therefore developers can propose changes to the code. This means that thanks to the contribution of other users there is a large number of extra examples that allow us to see many configurations for the use of the cameras, as well as questions about how they work.
In order to establish communications with the camera, we have to install the libraries and create a code.
We have created a script in python where the camare give us the distance between a camera and the object that the camera is pointing.
In the next figures we can see the scrip and also a screenshot of the image of the camera:
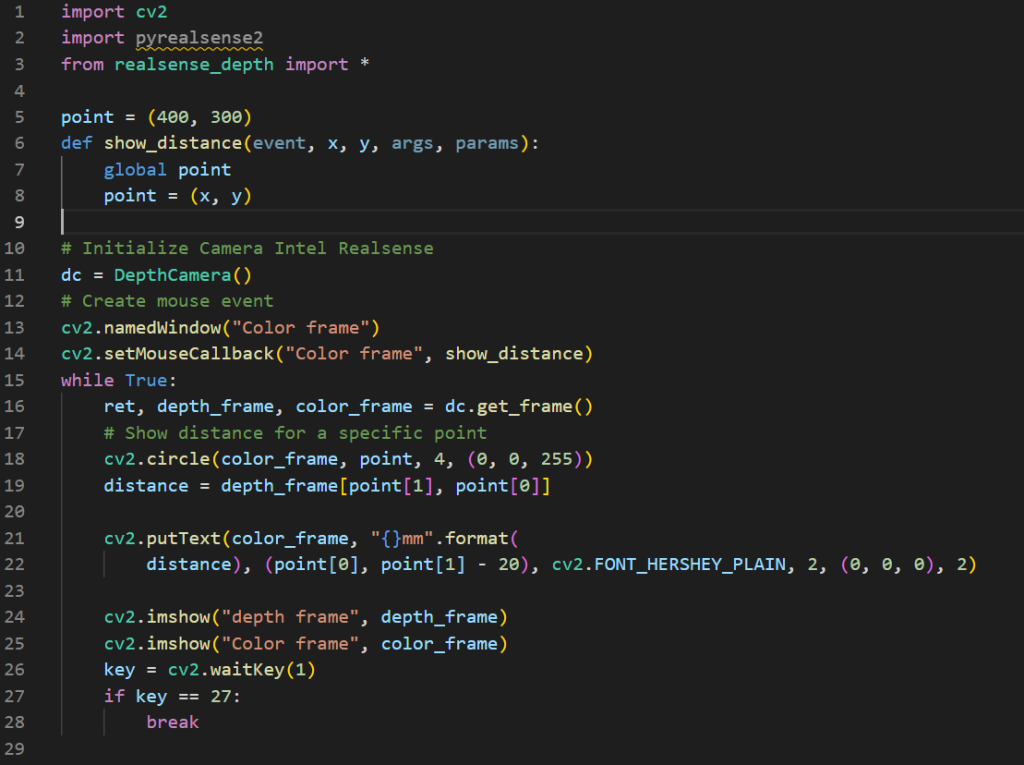
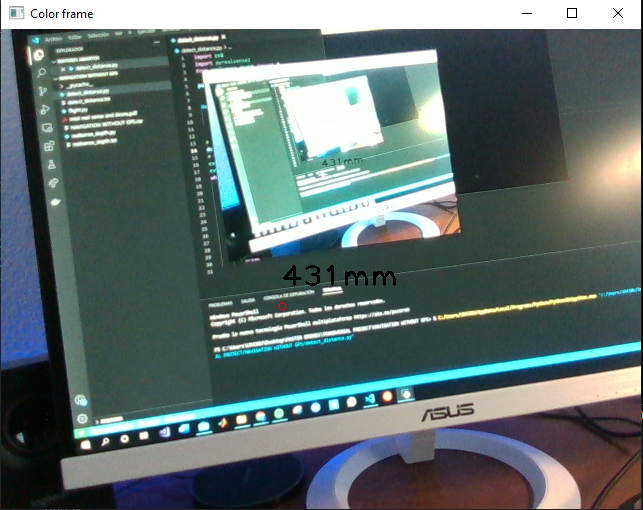
As it can be seen in the previous figure, the camera was pointing to the screen, and in the red point seen there is the distance, in mm, from the camera to the screen.

0 Comments