
All the data is stored and there are two types of logs in order to see the data. The first one is the Telemetry logs (tlogs), that are recorded by the ground station when you connect the drone to your computer. The other one is the Dataflash logs, stored on the autopilot.
The activity is about to download the dataflash logs and generate the graphs in order to see the good behavior of our Drone. To download the dataflash logs, we had to connect the Drone via USB to the mission planner, and in the DATA menu, go to the DataFlash Logs and press the button “Download DataFlash Log Via Mavlink”, to download the log of your flight. Then, to review it, just press the button “Review a Log”.
Now, some pictures will be presented in order to see some plots about the parameters recorded in our flight test.
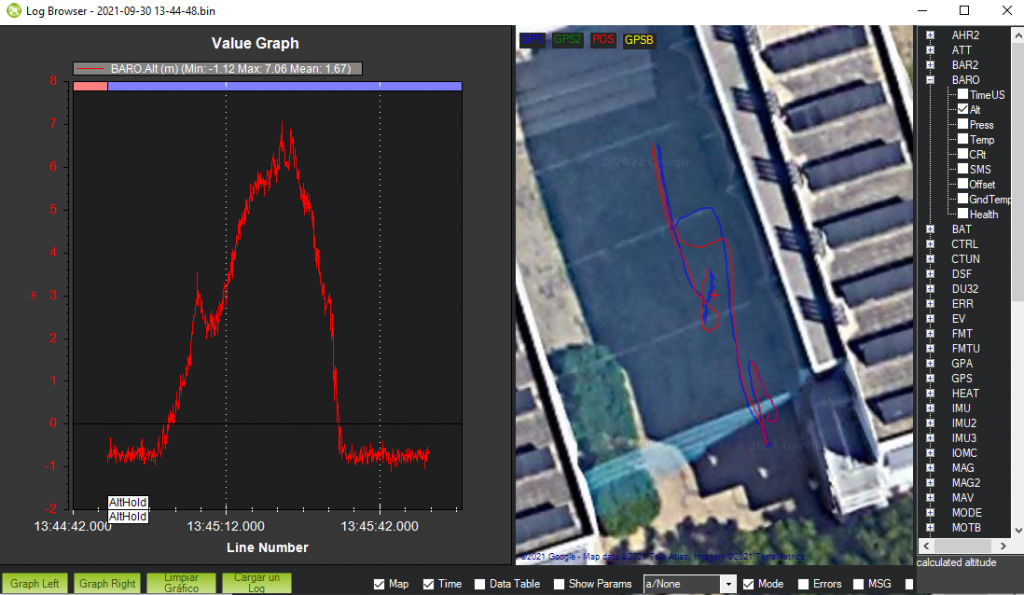
As can be seen in the previous images, the plots of the parameters that we have selected in the right column appear on the left. To the right of the plot, the image with the route taken by the Drone captured by the GPS appears. As the site where it was flown does not have much coverage since it is between two buildings, the precision of this route is not very exact. However, the precision of the graphics is, as these are captured by the controller and internal sensors.
First of all, we can see the altitude of our flight, which has a duration of just over 1 minute. The altitude gradually increased about 8 meters and then we descended until we landed.
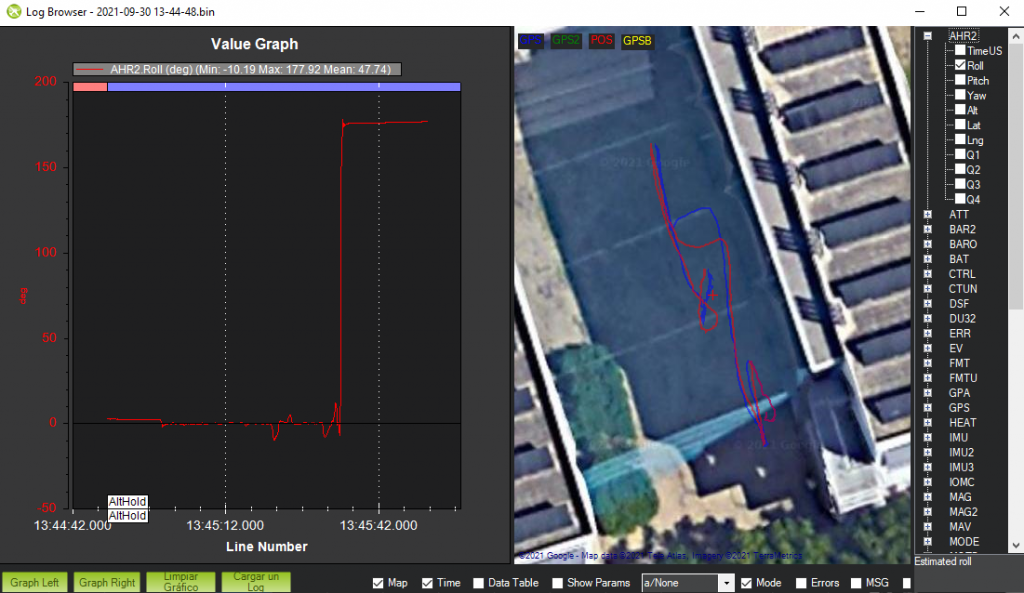
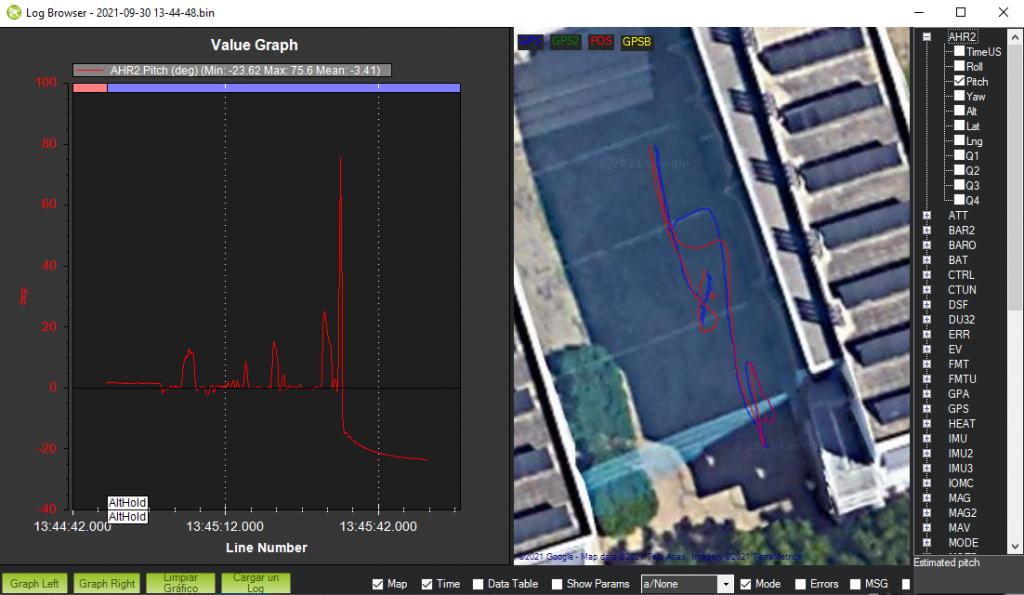
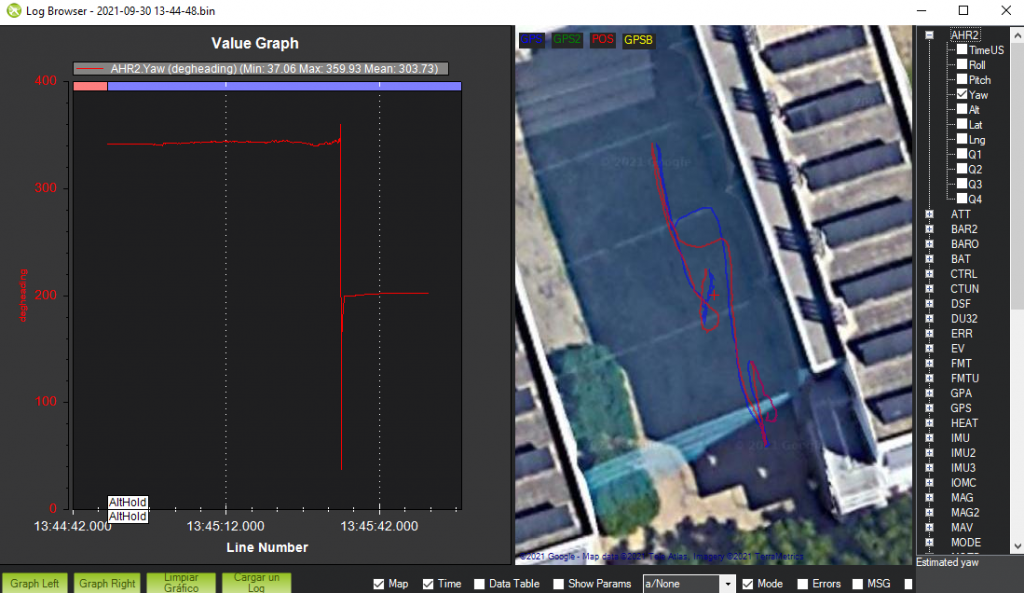
The plots with the values of Yaw, Pitch and Roll of the flight have also been presented. As you can see, the parameters, in degrees, have different values since during the flight corrections were made with the controls in order to keep the Drone stabilized and to make some turns according to the flight plan that we had to do.
This flight plan was not carried out 100% since the battery had around 1 minute of autonomy. However, as can be seen in the graphs, the drone’s behavior was correct and it had a stable flight.
So, thats all, thank you for reading our first phase of this project and we hope it has been helpful!