
Now its time to finish the assembly with all the components needed to fly. There is another helpfull video to fix everything well:
The steps followed are:
- Fix the autopilot to the upper body.
- Fix the radio receiver and connect it into the autopilot.
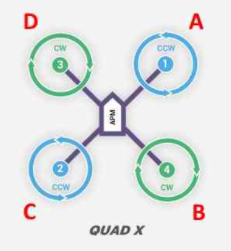
- Connect the motors to the autopilot and to the power distribution board. It is important to connect the motors in the correct output of the autopilot (output 1 to 4). We can see it in the previous picture of the rotation of the motors. For example, in the output chanell 1 must be connected the upper-right motor, in number two the lower-left motor…
- Mount the transparent plate with the GPS and connect it into the slot CAN 1. Here it is really important to mount the GPS pointing to the front. There is a little arrou at the tope of the module in order to know it. The front of the Drone is the side with the two orange arms.
- Mount the lower boddy and install the structure with the altimeter and the optical sensor. This sensor must be connected to the slot I2C 2 of the autopilot.
- Install the telemetry radio and connect it to the autopilot. This device allows to be connected with the mission planner during the flight in order to receive flight plans or send telemetry data. This component must be connected in the slot TELEM 1 of the autopilot. To be connected with the Mission Planner, another radio must be connected via USB to the computer.
- Fix the buzzer and connect it into the USB slot of the autopilot.
- Connect the power module to the slot of the autopilot called POWER in order to give energy to the motors and the autopilot.
- Incorporate the straps in the lower boddy to hold the baterry during the flight.
- Fix all the elements and maintain the cables far from the motors in order to reduce the probability to suffer an accident.
Here you have how our Drone lokks after doing these activities:

Before starting the next activity, it is important to mention something. In order to flight as stable as we can, you must fix all the elements as centered as possible. With this, the weight distribution will be proportional throughout the drone, and the center of gravity will be centered.